Final Project: Sensor Navigation
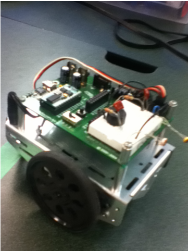
My robot is able to detect light intensity as variable, and depending on this variable the robot will perform a sequence of actions. It can be placed in a cage-like arena and it will never bump into a wall. The Photoresistors will work together if the robot is driving straight into the wall but they can also work independently, just in case the robot drives into the wall in an angle. My robot will begin will the Piezospeaker, that makes a beeping sound which means the program is initialized and my robot will begin to move forward around the arena/cage. When my robot detects a certain light intensity (the wall), my robot will go backwards and then do a 90 degrees turn away from the wall and it will continue to move forward until it meets another wall and it will perform the same actions again. With well commented and fully functional program, my robot will be equipped with the appropriate variables and Inputs/Outputs from the Photoresistors. Therefore, the name I given my robot is appropriate because it is functional and my program is 100% organized and clean of errors
